
PROBLEM
A project to programme and build a ball transport and sorting system using LEGO mindstorm. The transport vehicle must complete one loop around the track.

SOLUTION
Worked in a team of four where I successfully programmed and codded the ball transport and sorting system after design development in a team.
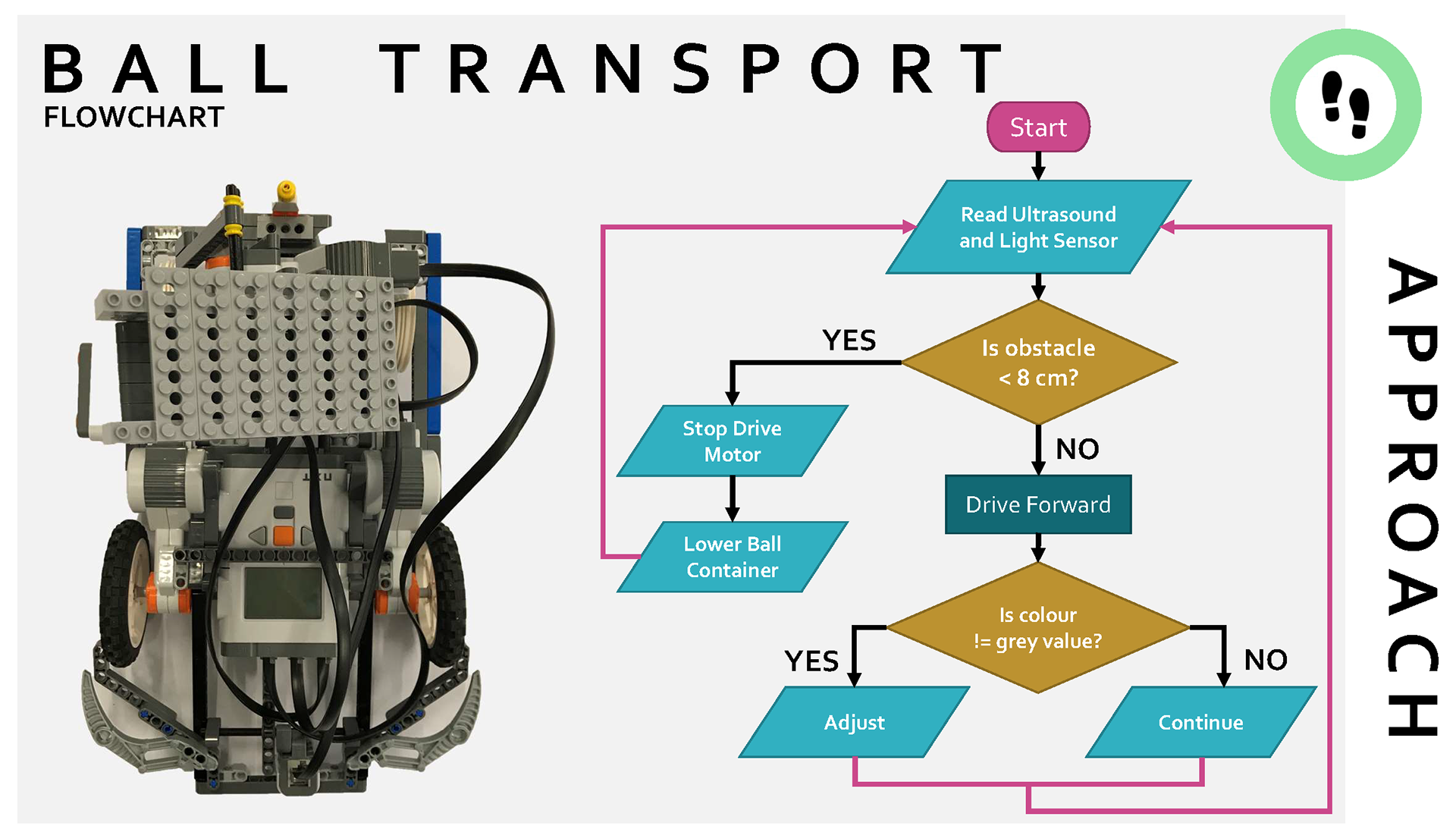
Using a light sensor on the ball transport vehicle, I was able to code the robot to find the grey value in order to follow the track. The robot was able to stop by the sorting system using an ultrasonic sensor.
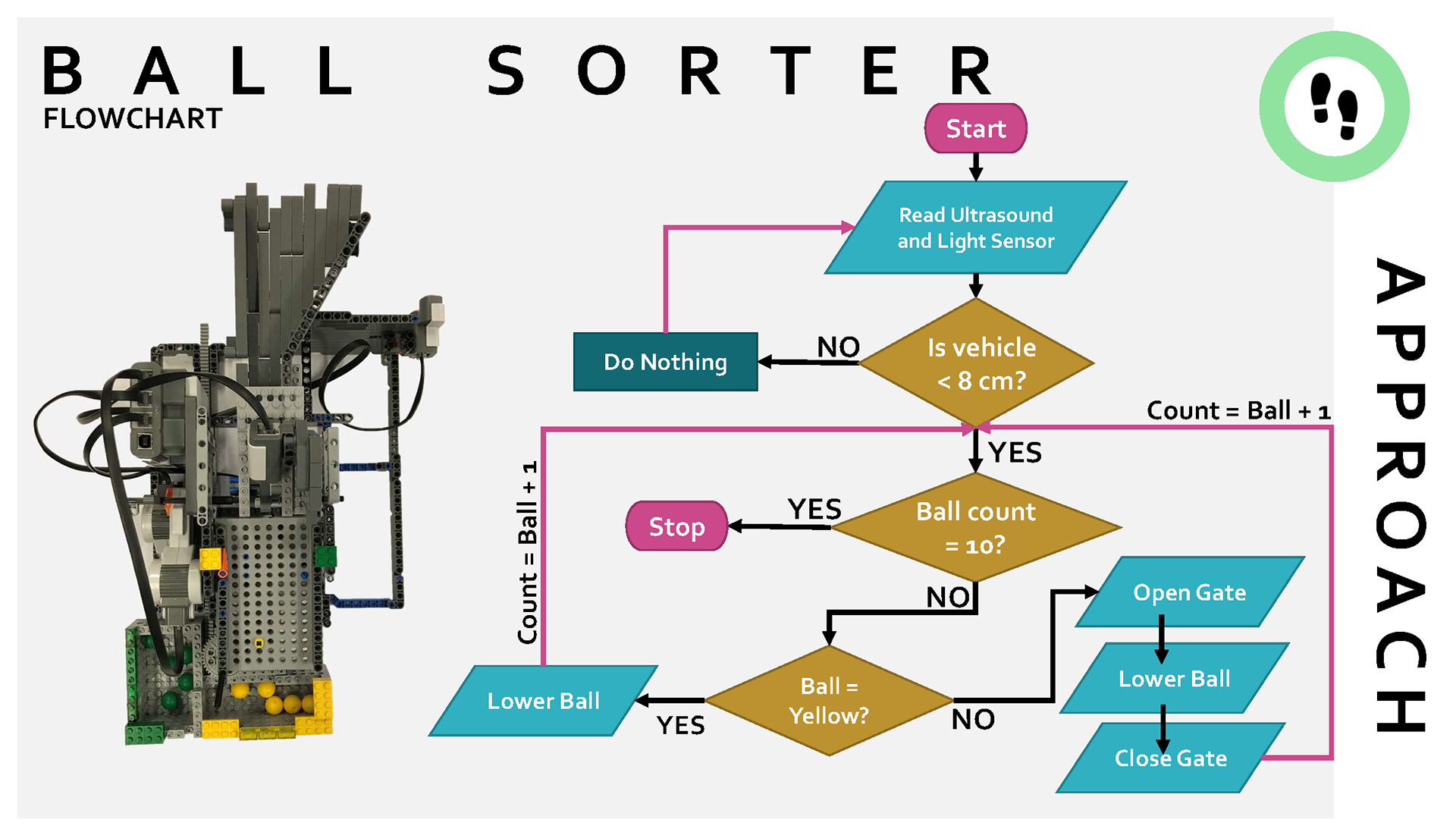
Using a light sensor, the ball sorting system is able to differentiate between the ball colours as they have different read values.
Completed Ball Transport and Sorting System Test

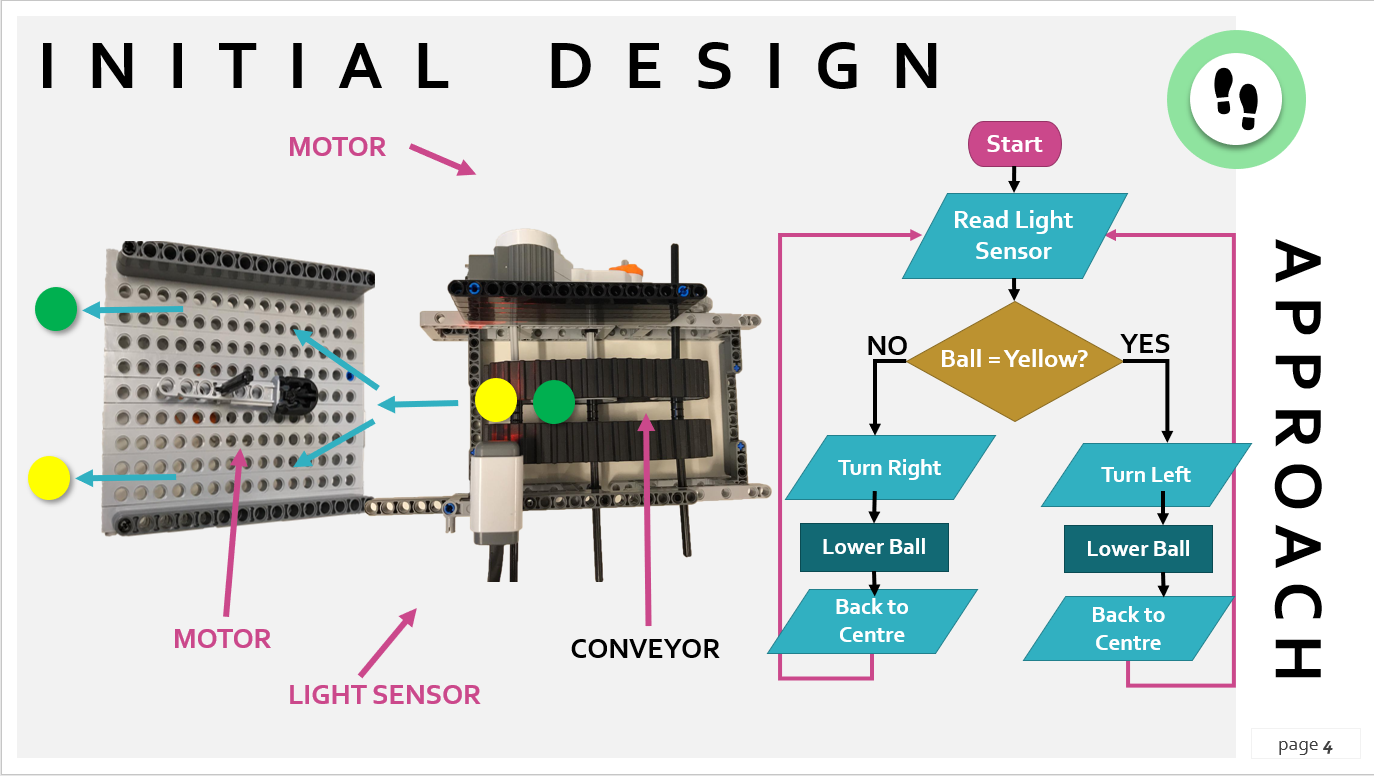
INITIAL DESIGN
After a quick brainstorm of designs, we started building and testing an idea.
Our conveyor design informed us to consider three things;
1. A way to stop the balls one as a time to be read by the light sensor.
2. The sorting mechanism needed less steps.
3. Need a funnel for the transporter to drop the balls into the sorter at an angle.
Our conveyor design informed us to consider three things;
1. A way to stop the balls one as a time to be read by the light sensor.
2. The sorting mechanism needed less steps.
3. Need a funnel for the transporter to drop the balls into the sorter at an angle.

FINAL DESIGN
These were our final designs for the ball transport and ball sorter machines.
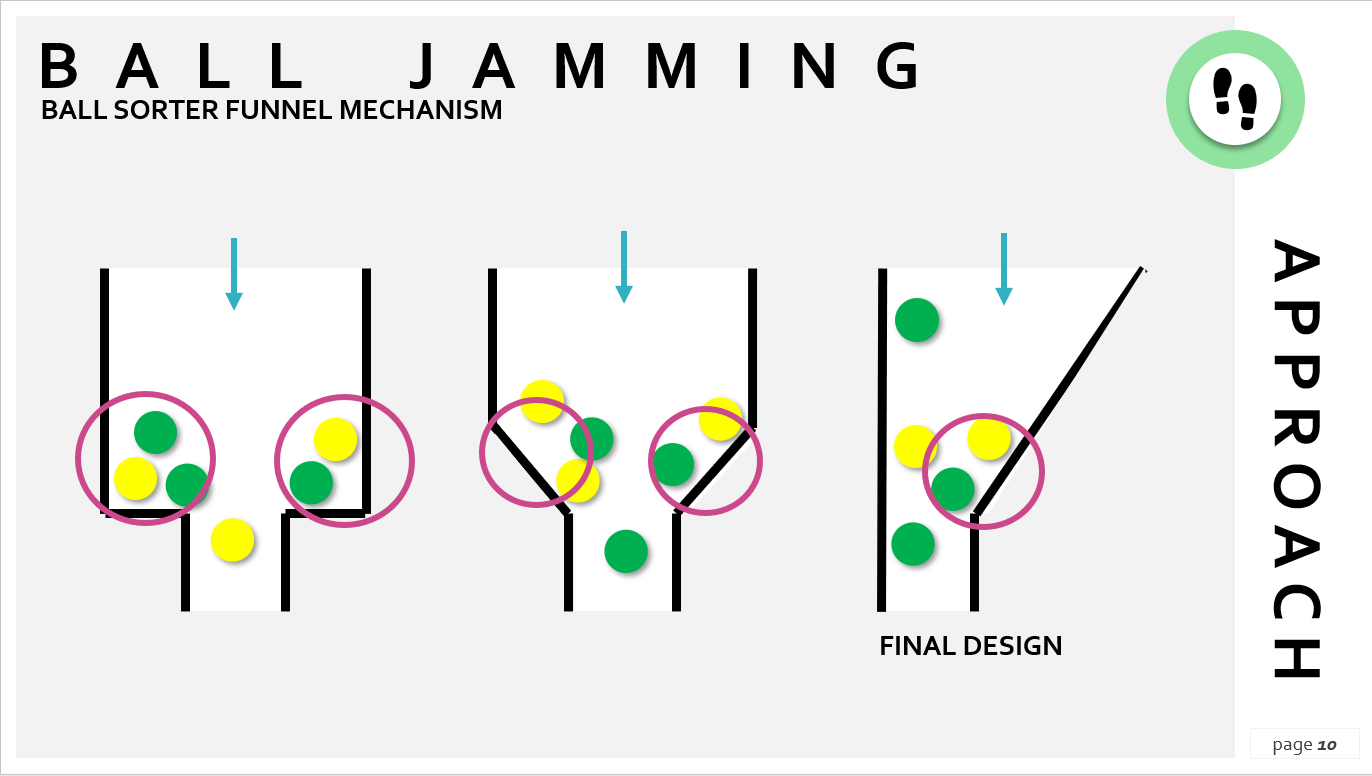
Funnel Development Final Design
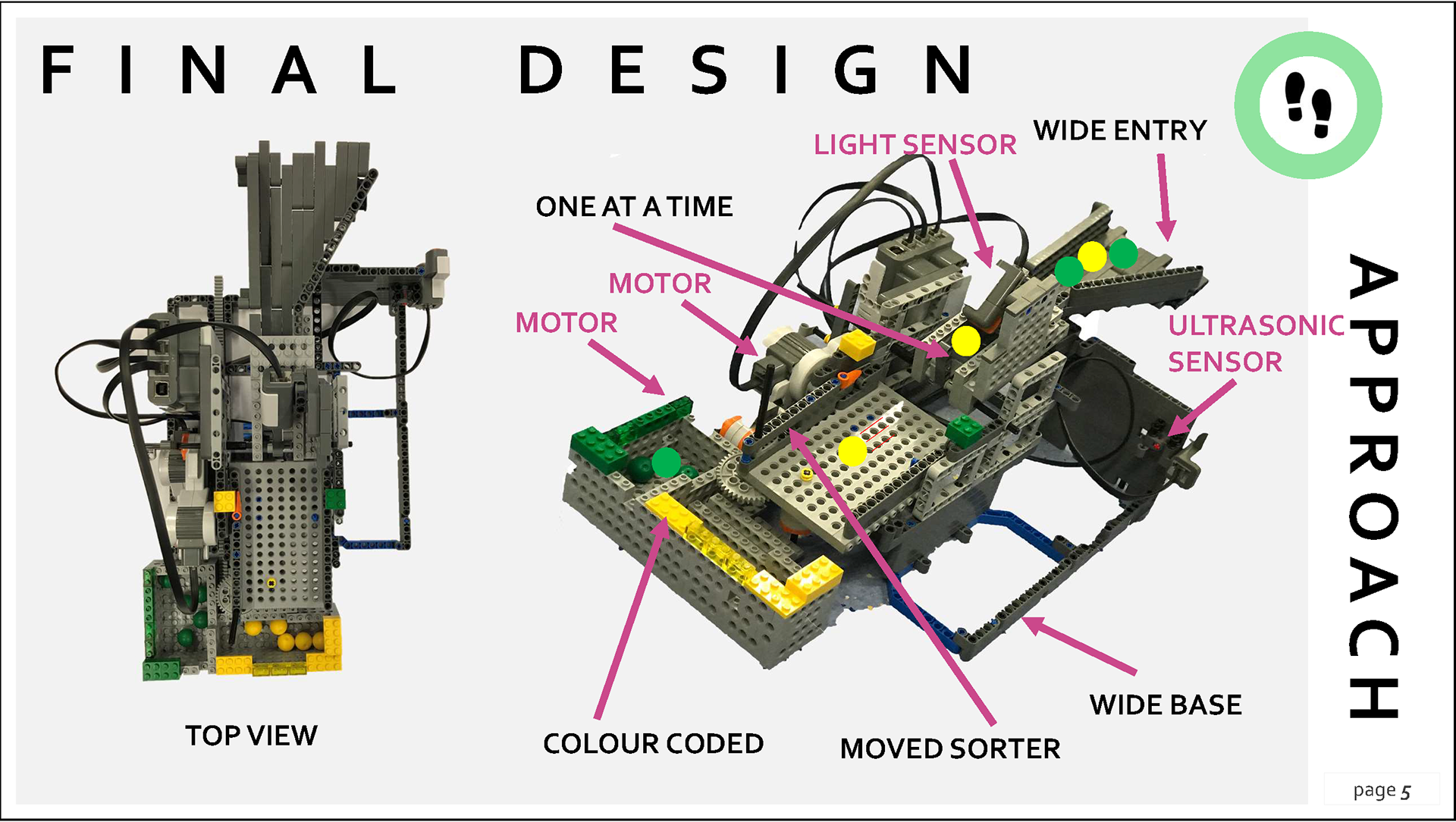
Sorter Final Design
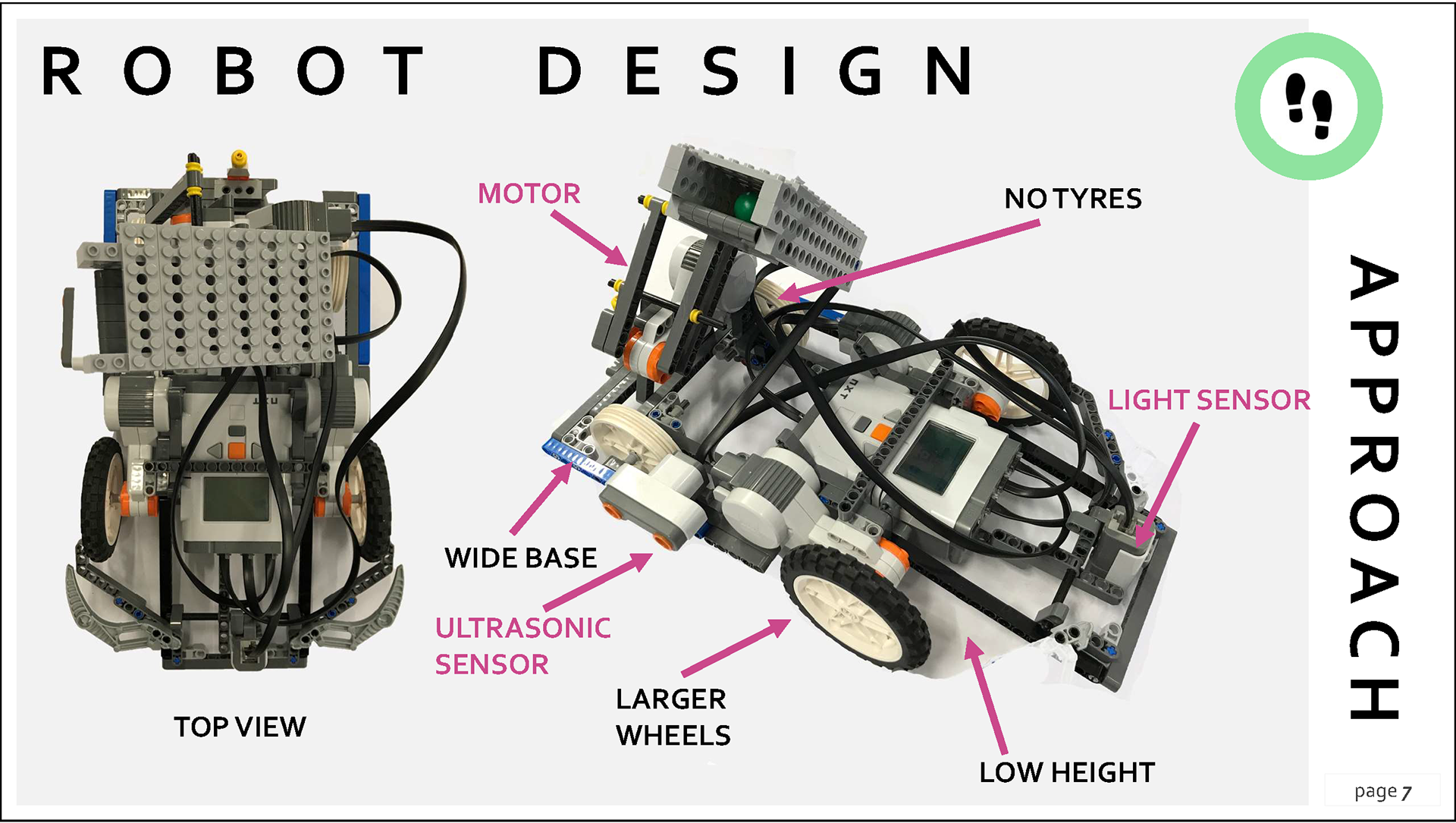
Transport Final Design

PROCESS AND CODE
Programmed the robot using NXC coding language.I used my knowledge of Python and C# to be able to successfully code the robot in a new language.
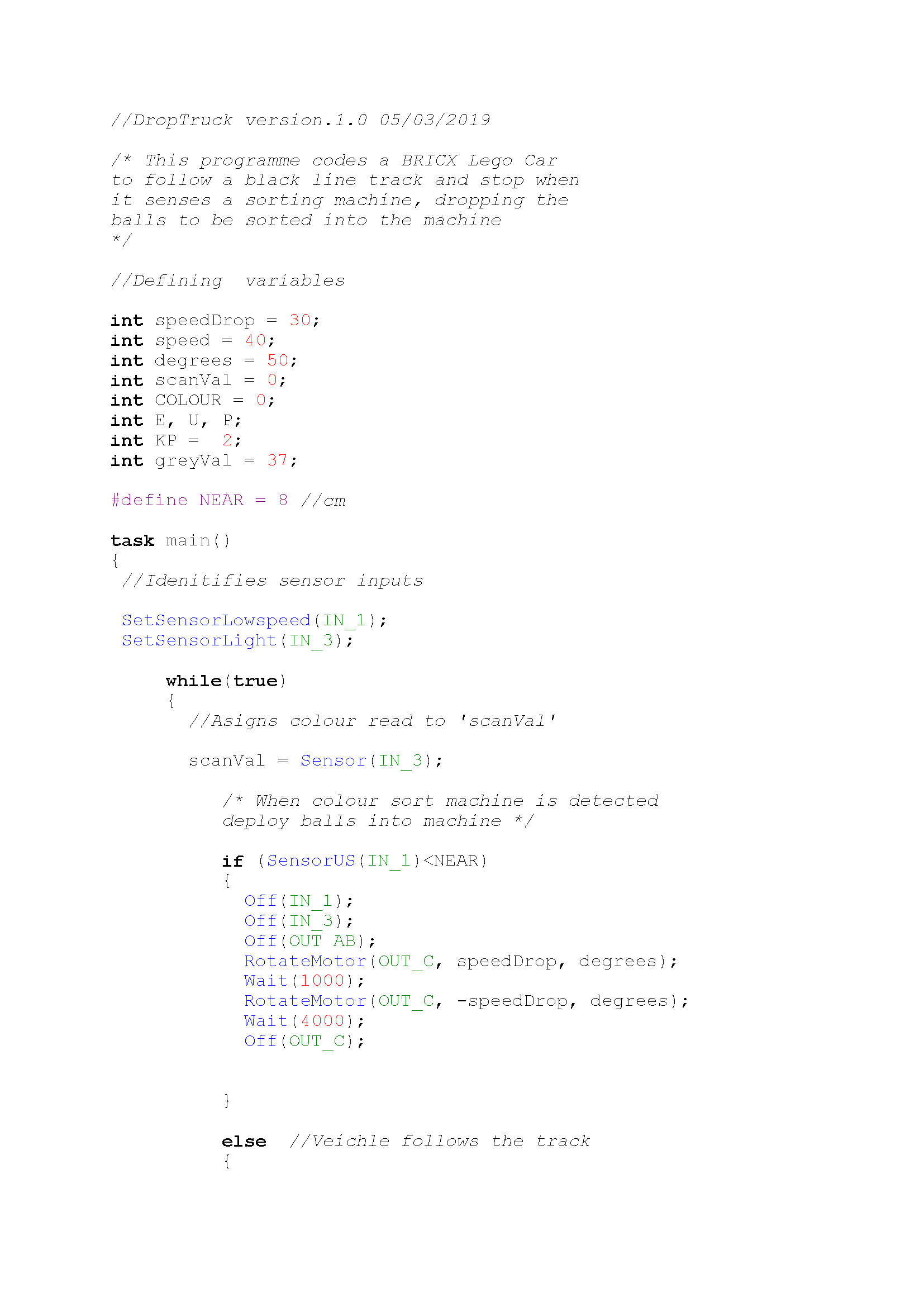
Ball Transporter Code page 1 of 2
